- 專欄
文章專區
2025-06-01從自駕車到健康照護 毫米波雷達如何走進我們的生活?
666 期
Author 作者
林昇洲 | 美國德州大學阿靈頓分校電機博士,專長包括無線通訊、光纖通訊、雷達設計、微波工程、統計訊號處理。
Take Home Message
• 毫米波具備高頻寬、低延遲特性,是自駕車雷達的關鍵要素,能在惡劣天候下精準偵測目標並提升交通安全。
• 隨著低成本、高整合度晶片的技術成熟,毫米波雷達已從軍事、航太走入民生,廣泛應用於非接觸式心跳、呼吸偵測、跌倒看護、安檢等領域。
• 深度學習技術正讓毫米波雷達具備更高的辨識力,能自動區分人體動作、提升目標追蹤與環境感知的準確性,未來將加速智慧醫療、物聯網和智慧城市的發展。
5G 飆網、衛星通訊、自駕車安全……這些「現在進行式」的科技都有個看不見又摸不著的幕後英雄──毫米波(mmWave)!聽起來有點距離,但其實這項技術也悄悄地滲透到智慧型手機和無人駕駛等我們逐漸習以為常的裝置當中。隨著6G、物聯網、人工智慧(artificial intelligence,AI)應用熱潮來襲,毫米波將如何突破傳輸瓶頸,引領未來的科技新浪潮?現在就來認識這個特殊頻段的神奇世界,看毫米波如何讓未來的生活更快速、更聰明、更安全。
毫米波,那是什麼?
所謂毫米波,是指波長介在1~10 毫米(mm)之間的電磁波,頻率為30~300千兆赫兹(GHz),但實務上其實是24 ~ 300 GHz。24 GHz 頻段原本並未落在毫米波的範圍裡, 但由於傳播特性相似,常被當成毫米波來研究和應用。
毫米波的波長處於微波(厘光波)與光波相交疊的範圍內,因此擁有兩種波譜的特徵(圖一)。然而根據電磁波基本原理,當波長短、頻率高時,波的傳播容易受障礙物影響而產生衰減(穿透能量大幅降低、傳輸距離縮短等),因此毫米波自然也有以上困境留待克服。
萬幸的是,相比於微波,毫米波的元件與天線可以做得更小,裝置易於安裝,不用消耗很多電力就能使天線產生足夠的增益及較窄的波束,避免傳輸時能量擴散,並傳送得更遠。與紅外線和光波相比,毫米波在大氣中傳播時的衰減較小,不易受自然光、熱幅射源與氣候影響,且穿透霧、煙、灰塵的能力較強,因此具有全天候可運作、空間分辨率高等特性。結合以上優勢,毫米波近來已成為現代通信系統及雷達的核心頻段。
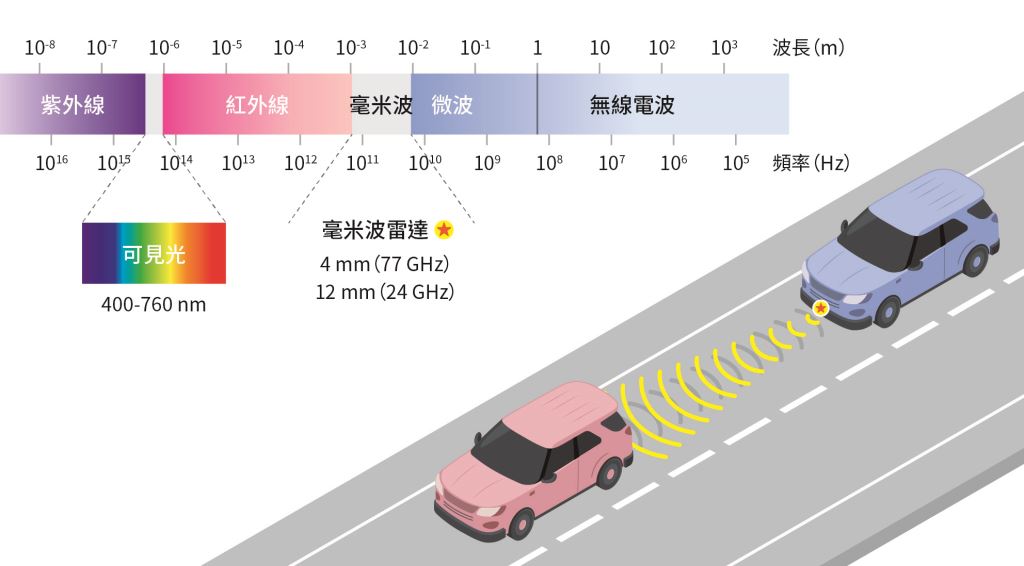 圖一| 毫米波頻譜(資料來源:作者提供)
圖一| 毫米波頻譜(資料來源:作者提供)
毫米波雷達是怎麼運作的?
雷達大致分為脈衝雷達(pulsed radar)與連續波雷達(continuous-wave radar, CW radar)。脈衝雷達就是週期性地發射短而強勁的脈衝,利用所接收的回波來偵測標的物;這種雷達的原理較簡單,但單次脈衝需求功率大,且接收與發射共用天線,所以存在發射期間的接收盲區,一般只適用在長距離偵測,目前尚未用於毫米波雷達產品。相反地,連續波雷達會朝目標方向發射不間斷的射頻訊號,並接收反射回來的訊號,藉由目標物運動時回波所產生的頻率變化,可推測目標物的移動速度,稱為都卜勒效應(Doppler effect)。
目前毫米波雷達多採用「調頻連續波」(frequency modulated continuous wave, FMCW)設計,接收與發射使用不同天線。FMCW 雷達的發射頻率會隨時間呈線性變化,因此發射訊號裡可以攜帶時間資訊,對多個目標同時實現測距和測速,有分辨率高、技術較成熟的優勢。毫米波雷達的硬體組成大致由發射器、接收器、訊號處理器和天線組成(圖二),開發者依應用需求來調整系統參數、發展演算法後,便可準確取得目標或環境的分析結果。
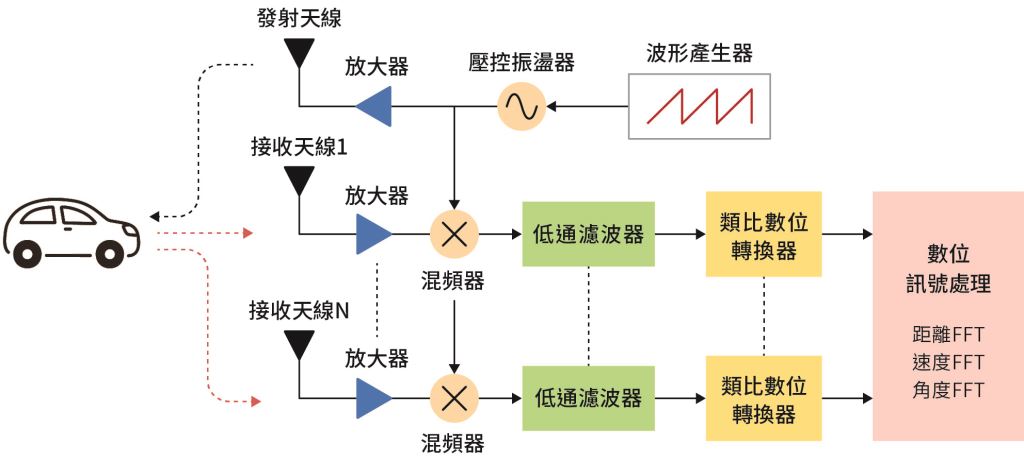
圖二 | 毫米波雷達的基本架構(資料來源:作者提供)
那麼毫米波如何接收訊號呢?首先壓控振盪器(voltage-controlled oscillator, VCO)會產生FMCW高頻訊號,藉由功率分配器(power divider)將一部分經過的波放大後送至發射天線;另一部分的波則耦合到混頻器(frequency mixer),與接收到的回波混頻後,利用低通濾波器(low-pass filter, LPF,允許低頻通過並阻斷高頻的過濾器)得到差頻訊號(beat frequency,兩個頻率不同的訊號,在混波後得到的頻率為兩者之差的新訊號),再經過類比數位轉換器(analog-to-digital converter, ADC)轉換,最後送至訊號處理器。透過這個過程,我們可以偵測出調變訊號的來回時間計算出目標的距離,並依照都卜勒效應從連續載波的相位變化,得到目標的速度資訊。
多個差頻組成的頻譜分離,每個頻譜峰值代表「在特定距離處存在的目標」。快速傅立葉變換(fast fourier transform, FFT)是快速計算離散傅立葉轉換的方法,傅立葉轉換可將時間訊號轉換到頻域,解析出訊號的振幅及相位頻譜。為了測量速度,FMCW 雷達發射兩個分開的線性調頻波,每個反射的線性調頻訊號也都經由FFT 處理,以檢測物體的距離(稱距離FFT)。與每個線性調頻脈衝相對應的距離FFT 在相同位置具有峰值,但相位不同,測得的相位差可用於估算物體速度。簡單的相位比較技術無法在此起作用,因此得發射兩個以上的線性調頻脈衝──雷達發送N 個等距的線性調頻脈衝,在N 個相量(phasor,包含振幅和相位的複數表示)上執行第二次FFT(稱都卜勒FFT),所測得的頻率即為該位置的目標速度所產生的都卜勒頻率,如此可分辨出「多目標的速度」。同時執行距離FFT 及都卜勒FFT 稱為「二維快速傅立葉變換」(2D-FFT)。
圖三為雷達感測器使用2D-FFT 產生「距離-速度」的測試結果(載波頻率24 GHz,調變頻寬128 MHz,調變週期1.024 ms,取樣點數512 點,連續取樣32 個週期),測試的場景為三個人手持反射器,個別以不同的速度靠近與遠離雷達。
物體距離的微小變化會導致距離FFT 或都卜勒FFT峰值的相位變化。若雷達使用至少兩個接收天線,目標到每個天線的差分距離(即無限小的變化量)就會導致FFT 峰值的相位變化,我們能據此利用FMCW 雷達系統估算出反射訊號在水平面的角度。另外,每路的接收天線後方都需安置單獨接收處理鏈(包含低雜訊放大器、混頻器、低通濾波器和類比數位轉換器)。
具有單發射和多接收天線的雷達則稱為「單輸入多輸出」(single-input-multiple-output, SIMO)雷達,角度解析度取決於接收天線的數量。相反地,若為多個發射和多個接收天線的雷達,則稱為多輸入多輸出(multi-input multi-output, MIMO)雷達;為提高角度分辨率,毫米波雷達一般使用MIMO 天線技術,具有M 個發射天線和N 個接收天線的MIMO 雷達,角度分辨率等同M×N 個接收天線的SIMO 雷達。若要使角度解析度加倍,SIMO 的方法是將接收天線數加倍(例如從四個擴展到八個),在MIMO 的概念下則只需增加一個發射天線,也因此MIMO 雷達在這方面更顯經濟、有效。
你的生活大小事,可能都離不開毫米波雷達
隨著毫米波雷達技術日益成熟,應用領域正快速擴展。毫米波雷達憑藉高解析度、全天候運作與精準感測等優勢,不僅在自駕車、智慧交通等熱門話題中嶄露頭角,也深入智慧家居、健康照護乃至AI 等多元場景。……【更多內容請閱讀科學月刊第666期】